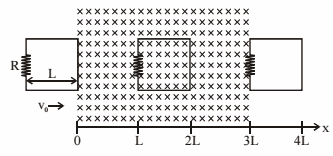
When loop was entering (x < L)ϕ=BLxe=−dtdϕ=−BLdtdx∣e∣=BLVi=Re=RBLV(ACW)F = ilB(Left direction)=RB2L2V (in left direction)⇒a=mF=−mRB2L2Va=VdxdVVdxdV=−mRB2L2V⇒V0∫VdV=−mRB2L2V0∫xdx⇒V=V0−mRB2L2x (straight line of negative slope for x < L)I=RBLV⇒(I vs x will also be straight line of negative slope for x < L)L≤x≤3L
dtdϕ=0e = 0 i = 0F = 0x > 4L
e = BlVForce also will be in left directioni=RBLV (clock wise) a=−mRB2L2V=VdxdVF=RB2L2VL∫x−mRB2l2=vi∫vfdV⇒−mRB2L2(x−L)=Vf−ViVf=Vi−mrB2L2(x−L) (straight line of negative slope)I=RBLV→(Clockwise) (straight line of negative slope)